Haoyu Ma
MS Robotics at UMich
About Me
I am a master student of Robotics Department at University of Michigan (UMich), where I work on underwater robot digital twin with professor Katherine Skinner. Prior to that, I received my bachelor of science degree from University of North Carolina at Chapel Hill (UNC), double majoring in Physics and Applied Mathematics. Advised by professor Pedro Sáenz, I conducted natural science research on fluid mechanics and received training on hands-on engineering skills.
I am interested in synthetic data generation and closing sim2real gap for robot simulation, facilitating robot learning in virtual environment and minimizing deployment effort in real world. I am proficient in Isaac Sim\Lab with a focus on high-fidelity OpenUSD digital twin and GPU-accelerated computing. I am also a self-confessed geek for computer graphic and I am coding a raytracer from scratch.
News
04/2025 OceanSim is featured by NVIDIA Robotics!
04/2025 🔥 Beta version of OceanSim is released!
03/2025 🎉 OceanSim will be presented at AQ²UASIM and the late-breaking poster session at ICRA 2025!
12/2024 I have joined the Field Robotics Group at UMich Robotics.
Publications * denotes equal contributions
SurfSLAM: Sim-to-Real Underwater Stereo Reconstruction For Real-Time SLAM
arXiv preprint, 2026
Onur Bagoren*, Seth Isaacson*, Sacchin Sundar, Yung-Ching Sun, Anja Sheppard, Haoyu Ma, Abrar Shariff, Ram Vasudevan, Katherine A. Skinner
[
Web
]
[
PDF
]
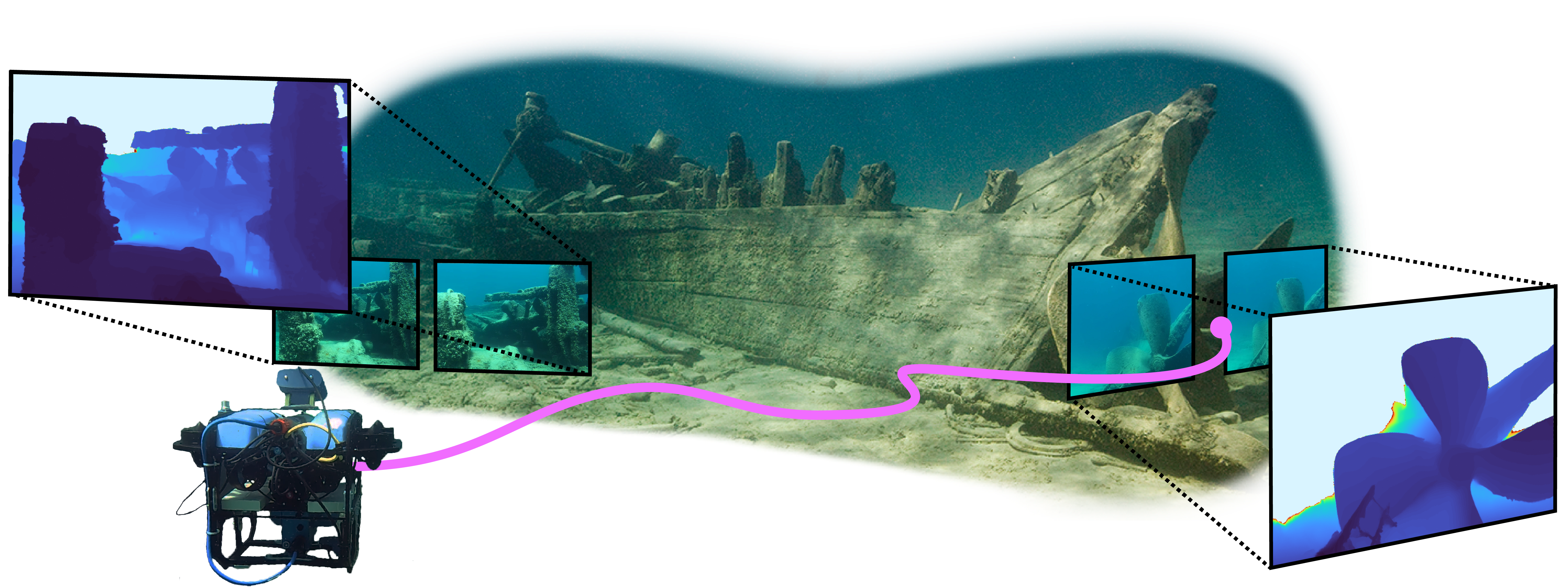
We propose SurfSLAM, a real-time underwater SLAM framework that fuses stereo cameras with IMU, barometric, and Doppler Velocity Log (DVL) measurements. We introduce a sim-to-real training pipeline for underwater stereo depth estimation and present a new real-world shipwreck dataset. Our approach enables accurate trajectory estimation and 3D reconstruction in challenging underwater environments. |
OceanSim: A GPU-Accelerated Underwater Robot Perception Simulation Framework
NVIDIA Robotics Featured
IROS 2025
Song, J.*, Ma, H.*, Bagoren, O., Sethuraman, A., Zhang, Y., & Skinner, K.
 [
Code
]
[
Web
]
[
PDF
]
[
Media
]
[
Code
]
[
Web
]
[
PDF
]
[
Media
]
We propose OceanSim, a high-fidelity GPU-accelerated underwater simulator built upon Isaac Sim for underwater robots applications. We leveraged advanced physics-based rendering and GPU computation to reduce the sim-to-real gap for common underwater sensors and fast SDG. |
Highlighted Projects
Synthethic Manipulation Data Generation with Kuka Teleop in Isaac Sim Interfacing Isaac Sim VR extension with Apple Vision joystick and motion planning with MoveIt for tele-operating Kuka. Leveraged Isaac Sim physics for simulation of forced manipulation task such as closing oil cap, and deformable object such as engine dipstick. Synthetic vision and force throughput can reach 20Hz+ on a RTX 3090 machine, facilitating downstream policy training. |

High Fidelity Terrain Synthesis for Object Detection in Natural Environments Leveraging OpenUSD, the terrain generation takes textures from real world scan or procedurally generated, automatically parses AO\Normal\bump\etc., and a low-res mesh displaced from displacement map is used for physics simulation. The gif demonstrates spawning distractors (underwater plants) and target objects (sea urchins) for SDG. |
Simulating Water Caustics in Omniverse RTX Renderer By binding opaque material to a mesh connected to a Warp kernel for Ocean Deformation, we can simulate water caustics in Omniverse raytracing renderer. The gif demonstrates the effect of water caustics as changing light attributes. |
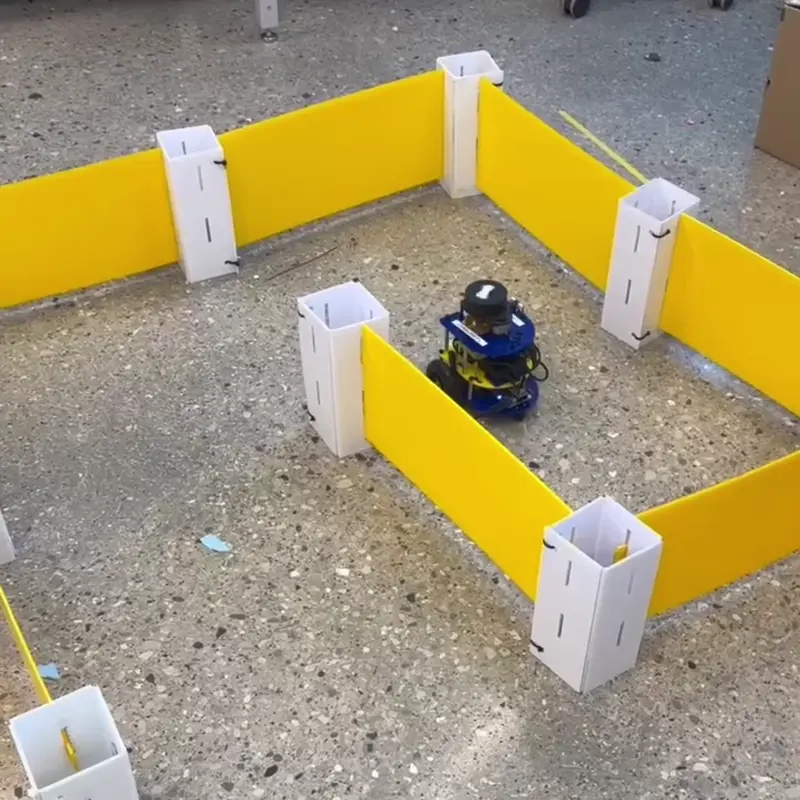
Autonomous Maze Traversal with Wheeled Mobile Robot Autonomous maze exploration and mapping framework for a wheeled robot. The robot performs A* plannning to the evolving frontiers on a 2D occupancy grid map. Lidar scan combined with the particle filter is used for SLAM. |
Manipulator Vision-based Object Sorting Object identification and sorting based on shape, color, and size using a RX-200 robotic arm aided by the stereo vision camera. |
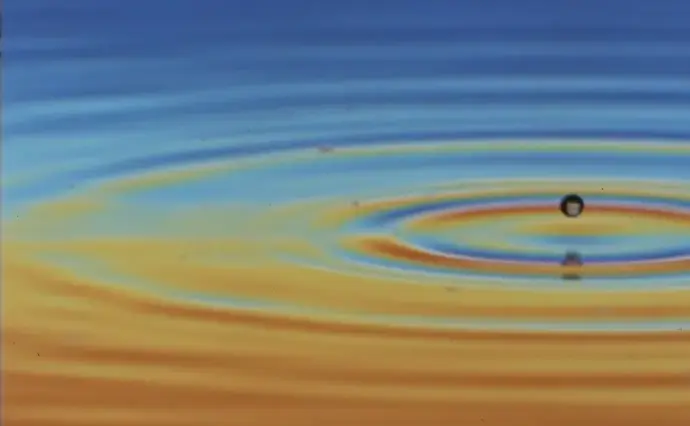
Spontantous Walking of Solid Particles on Fluid Interfaces (Oral) Division of Fluid Dynamics (DFD) 2024 [ PPT ] Discovered the effect of micro-particles breaking symmetry and move spontaneously on a vibrated interface between two fluids. Proposed a coupled PDE model and simulate in Matlab. |
Experimental Platform for Vibrational Fluid Dynamic Research A new mechanical design that leverages Modal Shop electrodynamic shaker interfaced with LabView and NI-DAQ to perform high precision fluid dynamic experiment. |
Experience
|
|
Research Assistant
Field Robotics Group, UMich, Dec 2024 - Present |
|
|
Research Assistant
Autonomous Robotic Manipulation Lab, UMich, May 2025 - Aug 2025 |
|
|
Research Assistant
Physical Mathematics Lab, UNC, Jan 2022 - May 2024 |
Education
|
|
University of Michigan at Ann Arbor, US
Aug 2024 - Present, Master of Science in Robotics |
|
|
University of North Carolina at Chapel Hill, US
Sep 2020 - May 2024, Bachelor of Science in Applied Mathamatics & Physics |
Honors & Awards
|
Department of Robotics, UMich, Oct 2025 |
Rackham International Student Fellowship Robotics Department Finalist Two finalists per department selected to College of Engineering for fellowship competition. |
|
Department of Physics and Astronomy, UNC, April 2023 |
Daniel C. Johnson Outstanding Junior Award Awarded annually to the most outstanding student judged by faculty committee. |
|
Department of Undergraduate Research, UNC, May 2023 |
Summer Undergraduate Research Fellowship 54 recipients at year 2023. $4000 fellowship granted. |
Template from here